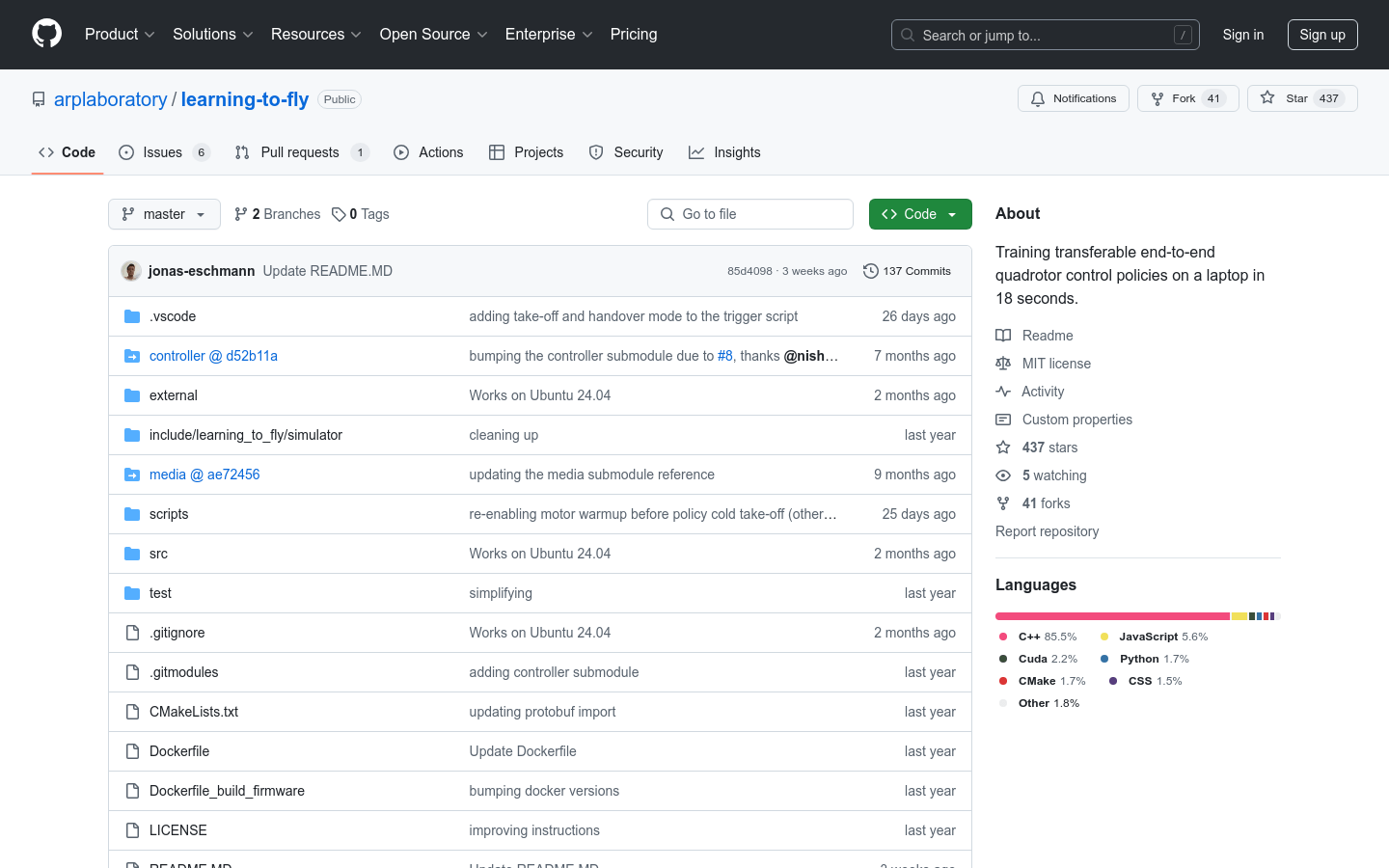
Learning to Fly
Train a transferable quadcopter control strategy within 18 seconds
0
- Quick Training: Able to complete quadcopter control strategy training on a laptop within 18 seconds.
- End to end control: Provides complete strategy training from sensor inputs to control outputs.
- Generalization ability: The trained strategy can be transferred to real-world quadcopter aircraft.
- Deep reinforcement learning: relying on the RLtools library, utilizing deep reinforcement learning techniques for policy training.
- Cross platform support: Provides Docker support and can run on multiple operating systems.
- User Interface: Provides a web-based user interface for easy monitoring of the training process.
- Tensorboard logging: Supports Tensorboard logging for easy analysis of training results.
- Open source code: All code is open source on GitHub for community contribution and improvement.
Product Details
Learning to Fly (L2F) is an open-source project aimed at training end-to-end control strategies through deep reinforcement learning and enabling rapid training on consumer grade laptops. The main advantage of this project is its fast training speed, which can be completed in a few seconds, and the trained strategy has good generalization ability, which can be directly deployed on real quadcopter aircraft. The L2F project relies on the RLtools deep reinforcement learning library and provides detailed installation and deployment guidelines, enabling researchers and developers to quickly get started and conduct experiments.